Tác giả: Frantz Lohier, Philip David Cooper, Saurabh Bahl, và Andrew Timpone
Ngày phát hành: 27 JAN 2026
Chuyên mục: Best Practices, High Performance Computing, Technical How-to
Bài viết này được đóng góp bởi Frantz Lohier (AWS), Andrew Timpone (AWS), Saurabh Bahl (AWS), Phil Cooper (AWS)
Các kỹ thuật mới trong mô hình hóa thế giới 3D và diễn giải cảnh tự động đang tạo ra một cuộc cách mạng trong nhiều ngành công nghiệp như khai thác mỏ và xây dựng. Bằng cách kết hợp các hệ thống thu thập hình ảnh (máy bay không người lái hoặc thiết bị quét 3D) với các công nghệ AI hỗ trợ đám mây, giờ đây có thể phân tích các cảnh phức tạp, lập kế hoạch hoặc theo dõi tiến độ trên mặt đất và cuối cùng là hướng dẫn hoặc tối ưu hóa hoạt động. Một số tín hiệu thị trường trong lĩnh vực khai thác mỏ và xây dựng cho thấy khách hàng AWS đang tìm kiếm các giải pháp thông minh thị giác để tự động hóa việc tạo ra các báo cáo kiểm tra có thể hành động. Bốn lớp thuật toán cơ bản được yêu cầu để đạt được mục tiêu cuối cùng này:
- SLAM (Simultaneous Location and Mapping): để giúp lập bản đồ địa hình và định vị chính xác các máy móc (như máy xúc trong khai thác mỏ)
- Photogrammetry để tái tạo một cảnh bằng cách sử dụng nhiều tư thế của hình ảnh tĩnh hoặc quét 3D
- Các kỹ thuật diễn giải cảnh được tái tạo từ đám mây điểm hoặc 3D như DSM2DTM (chuyển đổi mô hình bề mặt số sang mô hình địa hình số)
- Diễn giải nội dung hình ảnh hoặc video bằng các kỹ thuật AI
Một phần thách thức là mở rộng quy mô thực thi các thuật toán đòi hỏi nhiều tính toán này, ví dụ, trên các địa điểm khai thác mỏ và máy xúc, và nói chung là lượng lớn dữ liệu lịch sử được tạo ra. Trong blog này, chúng tôi chia sẻ các phương pháp hay nhất để ánh xạ việc thực thi một thư viện đám mây điểm 3D mã nguồn mở phổ biến lên một tập hợp các dịch vụ AWS phi máy chủ.
Dữ liệu LiDAR: Các chiến lược xử lý từ hiện trường đến đám mây
Sự phát triển của công nghệ LiDAR minh họa cả lời hứa và thách thức của sự tăng trưởng dữ liệu theo cấp số nhân. Khi lần đầu tiên được triển khai trên không, các hệ thống LiDAR di động đã tạo ra một cuộc cách mạng—cho phép tạo ra các Mô hình Địa hình Số (Digital Terrain Model) và Mô hình Bề mặt Số (Digital Surface Model) đã thay đổi cách chúng ta hiểu thế giới vật lý của mình. Xử lý dữ liệu ban đầu rất đơn giản: các máy tính xách tay với vài trăm megabyte dung lượng lưu trữ có thể xử lý toàn bộ tập dữ liệu khảo sát cục bộ. Thực tế ngày nay lại hoàn toàn khác biệt. LiDAR di động hoặc các cảm biến như Puck từ Velodyne tạo ra 600.000 điểm mỗi giây, mang lại độ chính xác dưới milimet và có khả năng tạo ra các bản sao kỹ thuật số với độ trung thực chưa từng có. Tuy nhiên, bước nhảy vọt về độ chính xác này đi kèm với chi phí tăng theo cấp số nhân—hàng terabyte dữ liệu đòi hỏi cơ sở hạ tầng đám mây tinh vi để khai thác giá trị của chúng. Sự chuyển đổi này buộc phải đưa ra một quyết định kiến trúc quan trọng: liệu sức mạnh xử lý có nên được đẩy ra biên, chấp nhận các hạn chế về thời lượng pin và giới hạn tính toán cục bộ, hay chúng ta nên đưa khối lượng dữ liệu khổng lồ này lên đám mây một cách hiệu quả, nơi xử lý có thể mở rộng quy mô để trích xuất thông tin tối đa?
Từ việc giám sát độ ổn định của sườn dốc trong các mỏ thông qua khảo sát LiDAR chính xác, đến mạng lưới sông ngòi qua các khu rừng rậm, hoặc kiểm tra đường dây điện—LiDAR và quét 3D đại diện cho một cảm biến rất mạnh mẽ để hiểu thế giới.
Ngày nay, quy mô thị trường LiDAR toàn cầu được ước tính đạt 2,74 tỷ USD vào năm 2024 và dự kiến sẽ đạt 4,71 tỷ USD vào năm 2030, tăng trưởng với tốc độ CAGR 9,5% Báo cáo phân tích quy mô, thị phần & xu hướng thị trường LiDAR, 2030. AWS giúp các tổ chức xác định và triển khai các chiến lược truyền dữ liệu cho cả môi trường kết nối và ngoại tuyến. Việc lựa chọn phương pháp truyền phụ thuộc vào khối lượng dữ liệu và nhu cầu hoạt động. Đối với các hoạt động khảo sát thông thường, AWS DataSync cung cấp một dịch vụ trực tuyến an toàn có thể tối ưu hóa kết nối mạng 10 Gbps thông qua một tác vụ duy nhất, làm cho nó trở nên lý tưởng cho việc tải lên LiDAR định kỳ. Các tổ chức có luồng dữ liệu khối lượng lớn ổn định sẽ hưởng lợi từ AWS Direct Connect, cung cấp các kết nối mạng chuyên dụng bỏ qua tắc nghẽn internet đồng thời cung cấp băng thông có thể dự đoán và chi phí truyền thấp hơn. Đối với các tập dữ liệu khổng lồ hoặc di chuyển ban đầu, các chiến lược tối ưu hóa bao gồm giảm thiểu lưu lượng truy cập giữa các Region để giảm chi phí, nén trước các đám mây điểm LiDAR bằng định dạng LAZ và triển khai các phương pháp tiếp cận lai kết hợp DataSync với Amazon Simple Storage Service (Amazon S3) File Gateway để giảm cơ sở hạ tầng tại chỗ trong khi vẫn duy trì kết nối liền mạch. Đối với hầu hết các khảo sát LiDAR, AWS DataSync cung cấp sự kết hợp tốt nhất giữa tốc độ, tự động hóa và hiệu quả chi phí. Đối với các trường hợp cụ thể, chúng tôi cũng sử dụng truyền song song thông qua nhiều tác vụ DataSync hoặc tải lên nhiều phần của Amazon S3. Việc lựa chọn giữa các phương pháp này dựa trên khối lượng dữ liệu, tần suất truyền, cơ sở hạ tầng hiện có và yêu cầu chi phí. Khi chúng ta cũng chứng kiến sự phát triển của mạng kết nối 4G, 5G và vệ tinh, kết nối biên thông minh sử dụng AWS IoT Greengrass v2 như được phát triển với đối tác Hexagon của chúng tôi đã đảm bảo khách hàng xây dựng các chiến lược thông minh để giảm chi phí và cải thiện việc phân phối.
Công nghệ LiDAR đã cách mạng hóa việc thu thập dữ liệu không gian thông qua nhiều nền tảng.
- Hệ thống trên không
- Đơn vị lập bản đồ di động
- Thiết bị cầm tay
- Cảm biến gắn trên máy bay không người lái
Từ đỉnh Everest đến những khu rừng rậm xa xôi, các nền tảng đa dạng này cho phép tiếp cận chưa từng có với khả năng đo lường. Khi việc thu thập dữ liệu của chúng tôi mở rộng, AWS cung cấp cơ sở hạ tầng mạnh mẽ cần thiết để xử lý, trích xuất và quản lý các tập dữ liệu khổng lồ này một cách hiệu quả. Quy trình làm việc của chúng tôi tập trung vào ba giai đoạn quan trọng:
- Thu nạp hiệu quả
- Truyền dữ liệu hợp lý từ hiện trường lên đám mây
- Giải pháp cho các thách thức truyền dữ liệu của nhà khảo sát truyền thống
- Giao thức tải lên được tối ưu hóa cho các tập dữ liệu lớn
- Xử lý thông minh
- Xử lý đám mây điểm có khả năng mở rộng
- Ví dụ, sử dụng OpenDroneMap (ODM)
- Tự động trích xuất Mô hình Bề mặt Số (DSM)
- Tạo Mô hình Địa hình Số (DTM)
- Khả năng tự động mở rộng quy mô cho các khối lượng dữ liệu khác nhau
- Phân phối chiến lược
- Sản xuất dữ liệu LiDAR sẵn sàng để phân tích
- Trích xuất vector để phát triển mô hình
- Định dạng đầu ra tùy chỉnh dựa trên yêu cầu của khách hàng
Quy trình làm việc này cho phép xử lý hiệu quả các khối lượng dữ liệu từ Gigabyte đến Petabyte, đảm bảo xử lý và phân phối các sản phẩm chính xác, cụ thể theo yêu cầu của khách hàng.
Triển khai mẫu có khả năng mở rộng của AWS để xử lý hình ảnh trên không
Trong phần này, chúng tôi tập trung vào việc tối ưu hóa quá trình xử lý đám mây điểm LiDAR bằng cách trình bày chi tiết một quy trình xử lý hình ảnh hỗ trợ đám mây nhằm xử lý một lượng lớn các bản quét và hình ảnh LiDAR được tạo ra từ máy bay không người lái.
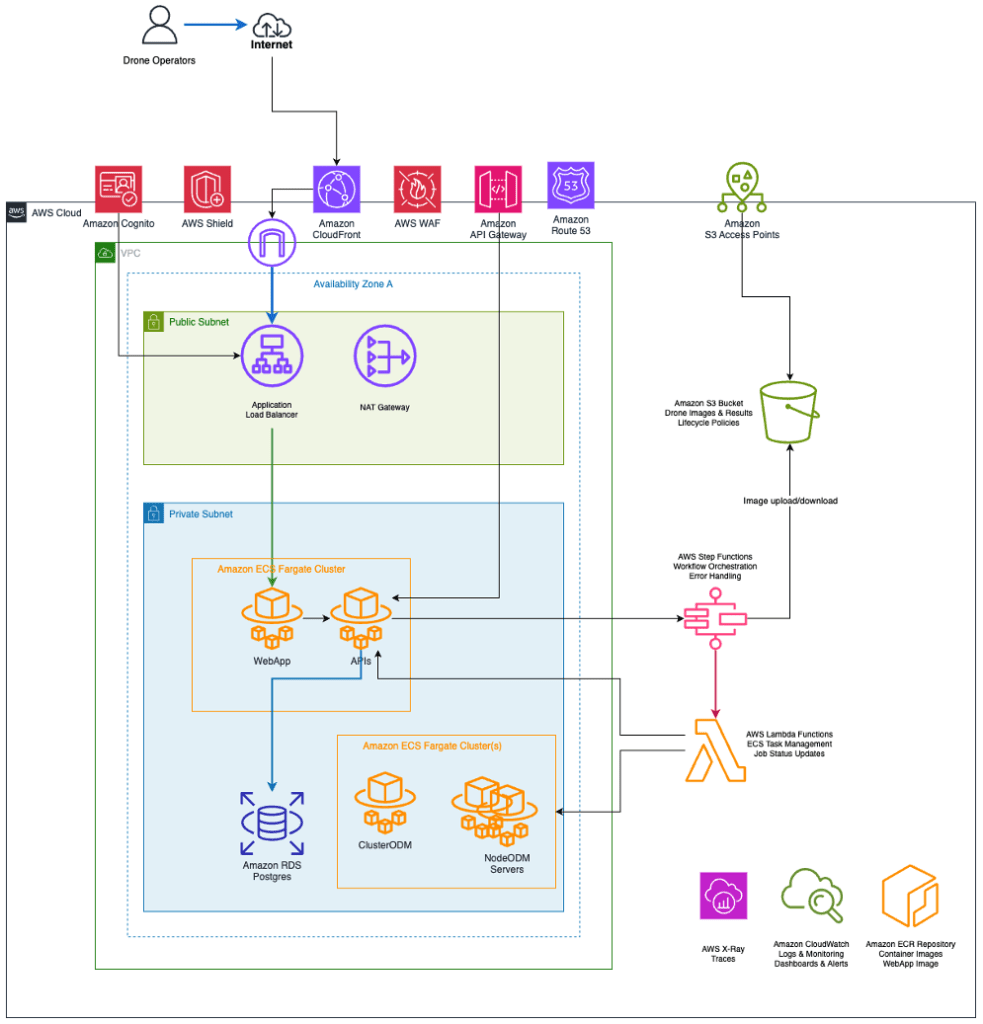
Hình 1: Kiến trúc hệ thống xử lý hình ảnh máy bay không người lái, như được mô tả trong bài viết.
Hệ thống xử lý hình ảnh máy bay không người lái là một giải pháp có khả năng mở rộng, được xây dựng trên đám mây AWS, chuyển đổi hình ảnh máy bay không người lái thô thành các sản phẩm không gian địa lý có giá trị bằng cách sử dụng thư viện OpenDroneMap (ODM) mã nguồn mở và các thuật toán photogrammetry. Hệ thống xử lý toàn bộ quy trình làm việc từ tải lên hình ảnh, xử lý đến phân phối kết quả, với cập nhật trạng thái theo thời gian thực và xử lý lỗi mạnh mẽ. Kiến trúc (Hình 1) bao gồm Amazon CloudFront cho mạng phân phối nội dung, Amazon Route 53 cho DNS, AWS API Gateway để truy cập API, AWS WAF và Shield để tự động phát hiện và giảm thiểu các cuộc tấn công, Amazon Cognito để xác thực, Amazon S3 Access Points để tải lên và tải xuống hình ảnh, Virtual Private Network với cả mạng con công cộng và riêng tư, một Application Load Balancer để quản lý quyền truy cập web vào ứng dụng, NAT Gateway để mạng con riêng tư truy cập internet, Amazon ECS Fargate cho các container lưu trữ API và ứng dụng web, Amazon RDS Postgres để lưu trữ và quản lý dữ liệu và trạng thái ứng dụng, Amazon ECS Fargate để lưu trữ các container cluster và node của OpenDroneMap, Amazon ECR Repository cho các image container, AWS Step Functions để quản lý điều phối và các bước của quy trình xử lý hình ảnh, AWS Lambda để quản lý và cập nhật tác vụ, Amazon S3 để lưu trữ hình ảnh chưa xử lý và đã xử lý, cùng với AWS X-Ray và Amazon CloudWatch để quan sát. Trong trường hợp có lo ngại về quyền riêng tư, hình ảnh được tải lên và quét 3D LiDAR có thể được tiền xử lý để làm mờ các vùng hình ảnh liên quan trước khi lưu trữ.
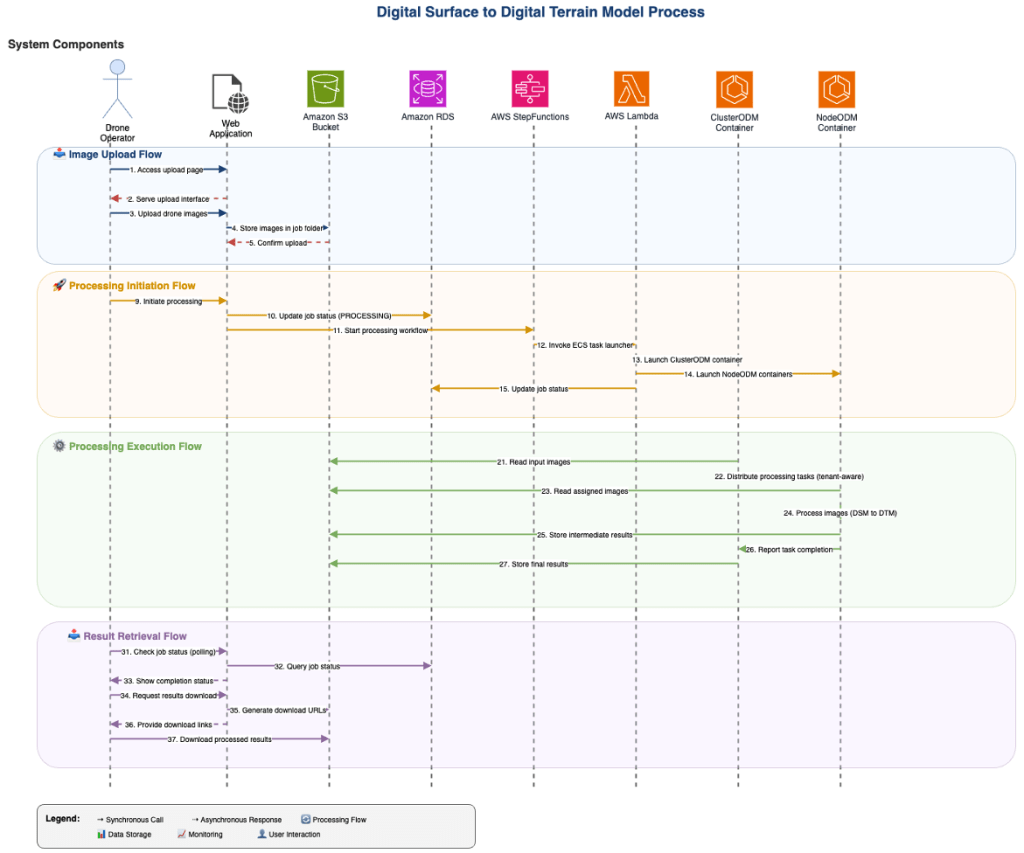
Hình 2: Quy trình làm việc của người dùng để xử lý hình ảnh máy bay không người lái từ đầu đến cuối, như được mô tả trong bài viết.
Quy trình làm việc (Hình 2) bắt đầu khi người vận hành máy bay không người lái truy cập ứng dụng web thông qua trình duyệt của họ. Application Load Balancer định tuyến yêu cầu đến một trong các phiên bản ứng dụng web đang chạy trên ECS Fargate. Ứng dụng hiển thị một giao diện tải lên trực quan. Khi người dùng tải lên hình ảnh máy bay không người lái của họ, ứng dụng ngay lập tức truyền các tệp đến bộ nhớ Amazon S3, sắp xếp chúng trong một cấu trúc thư mục phân cấp dưới một định danh công việc duy nhất. Đồng thời, ứng dụng trích xuất siêu dữ liệu từ hình ảnh (tọa độ GPS, cài đặt máy ảnh, dấu thời gian) và tạo một bản ghi công việc toàn diện trong cơ sở dữ liệu cluster Amazon Relational Database Service (Amazon RDS) cho PostgreSQL với trạng thái “UPLOADED”. Khi người dùng xác nhận bắt đầu xử lý, ứng dụng cập nhật trạng thái công việc thành “PROCESSING” và kích hoạt quy trình AWS Step Functions. Dịch vụ điều phối phi máy chủ này quản lý quy trình xử lý phức tạp, bắt đầu bằng cách gọi các hàm Lambda để khởi chạy các container ECS thích hợp.
Hệ thống khởi chạy hai loại container: ClusterODM (bộ điều phối) và nhiều container NodeODM (các worker). Kiến trúc phân tán này cho phép xử lý song song các tập dữ liệu hình ảnh lớn, với ClusterODM quản lý phân phối tác vụ và các container NodeODM thực hiện các phép tính photogrammetry thực tế. ClusterODM đọc hình ảnh đầu vào từ Amazon S3 và phân phối thông minh các tác vụ xử lý trên các container NodeODM có sẵn, triển khai phân bổ tài nguyên nhận biết người thuê. Mỗi container NodeODM xử lý các hình ảnh được gán thông qua toàn bộ quy trình photogrammetry, tạo ra các kết quả trung gian được lưu trữ trở lại S3. Quá trình xử lý bao gồm các thuật toán tinh vi để phát hiện đặc điểm, khớp hình ảnh, điều chỉnh bó, tạo đám mây điểm dày đặc, tạo lưới và ánh xạ kết cấu. Hệ thống chuyển đổi Mô hình Bề mặt Số (DSM) thành Mô hình Địa hình Số (DTM) và tạo ra các ảnh chỉnh hình chất lượng cao. Trong suốt quá trình xử lý, hệ thống duy trì giám sát toàn diện thông qua CloudWatch, với cả container ClusterODM và NodeODM báo cáo tiến độ và mức sử dụng tài nguyên. Ứng dụng truy vấn trạng thái công việc cung cấp cập nhật theo thời gian thực cho người dùng thông qua thăm dò. Sau khi hoàn thành, Step Functions điều phối việc dọn dẹp tài nguyên xử lý đồng thời đảm bảo tất cả các kết quả được lưu trữ đúng cách trong Amazon S3. Hệ thống tạo URL tải xuống và thông báo cho người dùng khi hoàn thành, cho phép họ truy cập các sản phẩm không gian địa lý đã xử lý của mình bao gồm DSM, DTM, ảnh chỉnh hình và báo cáo xử lý.
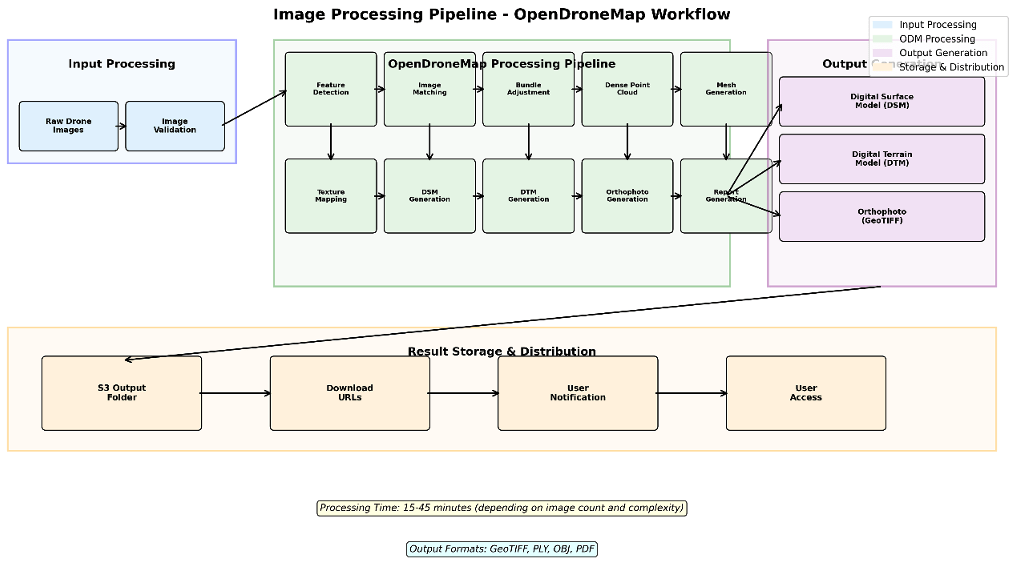
Hình 3: Quy trình xử lý hình ảnh như được mô tả trong bài viết.
Quy trình xử lý hình ảnh (Hình 3) đại diện cho quy trình làm việc photogrammetry cốt lõi, chuyển đổi hình ảnh máy bay không người lái thô thành các sản phẩm không gian địa lý có giá trị. Hình ảnh máy bay không người lái thô trải qua quá trình xác thực toàn diện bao gồm xác minh định dạng, kiểm tra độ phân giải, xác thực siêu dữ liệu GPS và phân tích chồng lấn. Hệ thống trích xuất siêu dữ liệu quan trọng bao gồm các thông số máy ảnh, mẫu đường bay và tọa độ không gian địa lý để hướng dẫn các thuật toán xử lý. Quá trình xử lý cốt lõi diễn ra thông qua một quy trình 10 bước tinh vi:
- Phát hiện đặc điểm: Xác định các điểm đặc trưng trong mỗi hình ảnh bằng cách sử dụng các thuật toán thị giác máy tính tiên tiến
- Khớp hình ảnh: Tìm các đặc điểm tương ứng giữa các hình ảnh chồng lấn để thiết lập mối quan hệ không gian
- Điều chỉnh bó: Tối ưu hóa vị trí và hướng của máy ảnh để đạt độ chính xác tối đa
- Tạo đám mây điểm dày đặc: Tạo các biểu diễn điểm 3D chi tiết của khu vực khảo sát
- Tạo lưới: Chuyển đổi đám mây điểm thành các mô hình bề mặt tam giác
- Ánh xạ kết cấu: Áp dụng các kết cấu ảnh vào lưới 3D để trực quan hóa thực tế
- Tạo DSM: Tạo Mô hình Bề mặt Số bao gồm tất cả các đặc điểm bề mặt
- Tạo DTM: Tạo Mô hình Địa hình Số đại diện cho độ cao mặt đất trần
- Tạo ảnh chỉnh hình: Tạo ảnh chụp từ trên không đã được hiệu chỉnh hình học
- Tạo báo cáo: Tạo các báo cáo xử lý toàn diện với các chỉ số chất lượng
Quy trình tạo ra nhiều định dạng đầu ra được tối ưu hóa cho các trường hợp sử dụng khác nhau: tệp GeoTIFF cho các ứng dụng GIS, đám mây điểm PLY để phân tích 3D, lưới OBJ để trực quan hóa và báo cáo PDF để tài liệu. Quá trình xử lý thường mất 15-45 phút tùy thuộc vào số lượng và độ phức tạp của hình ảnh. Tất cả các đầu ra được tổ chức một cách có hệ thống trong S3 với siêu dữ liệu thích hợp, chính sách vòng đời để tối ưu hóa chi phí và URL tải xuống an toàn để người dùng truy cập. Hệ thống duy trì lịch sử xử lý và cho phép xử lý lại với các tham số khác nhau.
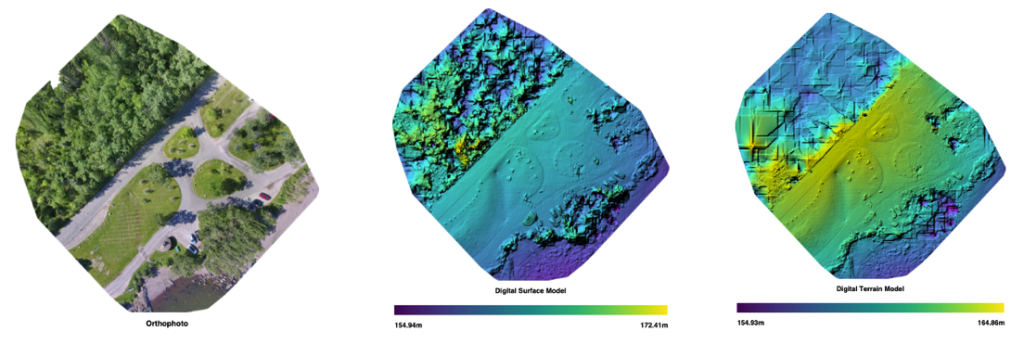
Hình 4, 5, 6: Ảnh chỉnh hình mẫu, mô hình bề mặt số và mô hình địa hình số, được mô tả trong bài viết.
Hình ảnh đầu tiên là một ảnh chỉnh hình (một hình ảnh trên không hoặc vệ tinh đã được hiệu chỉnh để loại bỏ biến dạng do độ nghiêng của máy ảnh và địa hình), hình ảnh thứ hai là một mô hình bề mặt số (một biểu diễn kỹ thuật số 3D của bề mặt Trái đất bao gồm tất cả các đặc điểm tự nhiên và nhân tạo như tòa nhà, cây cối và địa hình), và hình ảnh thứ ba là một mô hình địa hình số (một biểu diễn kỹ thuật số 3D của bề mặt đất trần của một cảnh quan, hiển thị độ cao, độ dốc và hình dạng bằng cách loại bỏ các đặc điểm như tòa nhà và cây cối, thường được tạo ra từ LiDAR hoặc photogrammetry, và được sử dụng trong kỹ thuật, lập bản đồ và nghiên cứu môi trường cho các tác vụ như mô hình hóa dòng chảy nước và lập kế hoạch xây dựng).
Từ dữ liệu này, khách hàng có thể sử dụng các mô hình này để hiểu rõ hơn về địa hình, các chướng ngại vật trên địa hình và lập kế hoạch tốt hơn cho việc sử dụng bất kỳ tài nguyên nào trên địa hình.
Kết luận
Bức tranh chuyển đổi kỹ thuật số đang được cách mạng hóa bởi các công nghệ thực tế kỹ thuật số thông minh tạo ra dữ liệu đám mây điểm chi tiết thông qua camera giá cả phải chăng, cảm biến LiDAR và robot tự hành. Sự gia tăng trong việc thu thập dữ liệu này đã tạo ra nhu cầu cấp thiết về các giải pháp xử lý tự động, trong đó điện toán đám mây đóng vai trò quan trọng trong việc chuyển đổi dữ liệu thô thành những thông tin chi tiết có giá trị. Các giải pháp HPC có khả năng mở rộng của AWS giải quyết những thách thức này bằng cách cung cấp tài nguyên tính toán theo yêu cầu có thể tự động mở rộng để xử lý các tập dữ liệu đám mây điểm khổng lồ mà không bị ràng buộc bởi cơ sở hạ tầng truyền thống. Bằng cách tận dụng AWS Step Functions để điều phối công việc và Amazon Elastic Container Service (Amazon ECS) Fargate cùng với Amazon Elastic Compute Cloud (Amazon EC2) Spot Instances, các tổ chức có thể xử lý khối lượng công việc hình ảnh 3D với mức tiết kiệm chi phí lên tới 90% so với các giải pháp tại chỗ. Ngoài ra, các công nghệ phi máy chủ của AWS như AWS Lambda và AWS Step Functions cho phép các quy trình xử lý theo sự kiện tự động kích hoạt khi hình ảnh máy bay không người lái mới đến, loại bỏ chi phí tài nguyên nhàn rỗi và đảm bảo dung lượng xử lý có sẵn chính xác khi cần. Cách tiếp cận kiến trúc này không chỉ tăng tốc thời gian thu thập thông tin chi tiết mà còn triển khai quản lý chi phí thông qua các chính sách tự động mở rộng quy mô và mô hình định giá dựa trên mức sử dụng. Nhu cầu ngày càng tăng về xử lý dữ liệu thời gian thực trên nhiều địa điểm đã làm tăng cường nhu cầu của thị trường đối với các giải pháp kiến trúc tinh vi, được thiết kế tốt, và sự kết hợp giữa khả năng HPC và tính linh hoạt phi máy chủ của AWS mang lại hiệu suất, phạm vi địa lý và hiệu quả chi phí mà quá trình xử lý dữ liệu 3D hiện đại đòi hỏi.
Về tác giả

Frantz Lohier
Frantz Lohier có 20 năm kinh nghiệm trong lĩnh vực Robotics và AI, chiến lược và phát triển kinh doanh trên các lĩnh vực tiêu dùng, công nghiệp và ô tô. Tại AWS, Frantz là Trưởng nhóm BD/GTM cấp cao toàn cầu, tập trung vào AI/ML và các hệ thống tự hành.

Philip David Cooper
Phil là một chuyên gia kinh doanh và kỹ thuật có uy tín trong lĩnh vực công nghệ, hỗ trợ sự phát triển và sử dụng công nghệ vệ tinh, không gian và đám mây trong cả ngành công nghiệp hàng không vũ trụ lớn khi làm việc tại Airbus trong 9 năm, cũng như khi anh điều hành công ty khởi nghiệp công nghệ của riêng mình Sterling GEO trong 8 năm trước khi làm việc cho công ty Cyient có trụ sở tại Ấn Độ gần 2 năm, quản lý các nhóm bán hàng trên khắp EMEA và Ấn Độ. Với 24 năm kinh nghiệm trong ngành quan sát Trái đất và không gian địa lý, Phil đã chứng kiến sự thay đổi từ nghiên cứu và phát triển với EO, sang khai thác hoạt động hàng ngày của nguồn dữ liệu phong phú và đang mở rộng nhanh chóng này. Phil đã làm việc trên nhiều nền tảng và trong các môi trường khác nhau, chứng kiến giá trị và tầm quan trọng của nội dung không gian địa lý chính xác, đáng tin cậy và có thể lặp lại. Công việc của anh bao gồm các dự án với UK MOD, Ngân hàng Thế giới, Inmarsat, Cơ quan Thanh toán Nông thôn và các chương trình Khảo sát Cơ sở hạ tầng Quốc gia. Ngoài việc ủng hộ giá trị của không gian trong cuộc sống hàng ngày của chúng ta, Phil còn là một đại sứ khoa học và công nghệ. Ngày nay, Phil là trưởng nhóm không gian địa lý toàn cầu cho khu vực công tại AWS, đã làm việc tại AWS gần 6 năm trong nhóm Trạm mặt đất và sau đó là nhóm Hàng không vũ trụ và Vệ tinh của AWS và hiện là trưởng nhóm Không gian địa lý toàn cầu cho Khu vực công của AWS. Phil có bằng Thạc sĩ Khoa học Quan sát Trái đất và MBA về Quản trị Kinh doanh, tốt nghiệp Trường Kinh doanh Said tại Đại học Oxford. Phil hiện là Nghiên cứu viên thỉnh giảng tại Khoa Vật lý và Thiên văn học của Đại học Leicester.

Saurabh Bahl
Saurabh Bahl có hơn 25 năm kinh nghiệm trong ngành Ô tô và Sản xuất, giúp các khách hàng doanh nghiệp lớn giải quyết các thách thức kinh doanh phức tạp bằng cách sử dụng AWS. Với chuyên môn sâu về Sản xuất, Chuỗi cung ứng, Máy móc được xác định bằng phần mềm và Di động tự hành, Saurabh thúc đẩy các sáng kiến chuyển đổi đám mây nhằm hiện đại hóa hoạt động và tăng tốc đổi mới cho các doanh nghiệp toàn cầu. Có trụ sở tại Dallas, Texas, Saurabh đã kết hôn và có một con trai, anh thích chơi cricket trong thời gian rảnh rỗi.

Andrew Timpone
Andrew Timpone có 6 năm kinh nghiệm trong kiến trúc đám mây, Andrew giúp các khách hàng doanh nghiệp lớn giải quyết các vấn đề kinh doanh của họ bằng cách sử dụng AWS. Andrew có hơn 25 năm kinh nghiệm về CNTT với chuyên môn về các mẫu tích hợp doanh nghiệp. Andrew đã kết hôn và có ba con, anh sống ở phía nam Cleveland, OH, nơi anh thích đạp xe, bắn cung và làm vườn rau.
